>Not much going on this week. We’ve been suffering component and supplier setbacks and it is a reminder of the environment we are unfortunately in.
The James Morrison EVCompnents case is devolving into a legal morass that has gone on for a year now. Forty three customers were bilked outright of their money – checks cashed but nothing shipped in a kind of bizarre bankruptcy fraud exit model designed by Mr. Morrison. In a world where Marthaa Stewart can do six months without being charged with a CRIME other than lying to the government (technically a Constitutional obligation actually) no one in Washington State has ANY interest in this case, including the judge in a filed lawsuit who has just continued the case for another couple of months.
But we’re having it here left and right. Our PAIR of 400 watt DC-DC converters from Chennic, which they market as an 800 watt converter, made it about a week and failed. We have piles of failed components, and often the reason they are failed is mostly Jack Rickard. So we submit very few warranty claims. In this case, they had only operated for aweek. It’s true we were operating at the top of their range voltage wise, but we WERE within the published specs, and they published them, we did not. They seem to agree, but want us to pay shipping for the replacements, which is actually more expensive than the devices in this case. You already know the details of DHL’s comical 12 day express delivery. DHL informs us the refund must be applied for from the shipper. They have decided it’s too much trouble and have declined to refund our delivery on the ORIGINAL DC-DC converter.
It just comes down to people selling things, and when they go wrong, they just don’t want to do what they said they would do BEFORE you bought and paid for it, after it’s actually happened,
What’s amazing is they just don’t even blink about it. The excuses are not even creative. It’s just they don’t want to do the expense and what are you going to do about it? It has become a WAY of business.
tm = new SWFObject(‘http://media.ev-tv.me/player.swf’,’flashContent’,’414′,’256′,’9′); tm.addParam(‘allowfullscreen’,’true’); tm.addParam(‘allowscriptaccess’,’always’); tm.addParam(‘displaytitle’,’true’); tm.addParam(‘stretching’,’none’); tm.addParam(‘displayclick’,’fullscreen’); tm.addVariable(‘file’,’http://media2.ev-tv.me/news021111 – iPhone.m4v’); tm.addVariable(‘image’,’http://media2.ev-tv.me/news021111.jpg’); tm.addVariable(‘plugins’, ‘adttext,hd-1,gapro-1,tipjar-1’); tm.addVariable(‘width’,’635′); tm.addVariable(‘tipjar.title’, ‘EVTV Tip Jar’); tm.addVariable(‘tipjar.text’, ‘If you would like to further our cause, you may make a small donation via PAYPAL’); tm.addVariable(‘tipjar.business’, ‘mjrickard@gmail.com’); tm.addVariable(‘tipjar.item_name’, ‘EVTV Bandwidth Donation’); tm.addVariable(‘tipjar.show_pause’, ‘false’); tm.addVariable(‘tipjar.show_complete’, ‘true’); tm.addVariable(‘viral.callout’, ‘none’); tm.addVariable(‘viral.onpause’, ‘false’); tm.addVariable(‘viral.oncomplete’, ‘false’); tm.addVariable(‘viral.functions’, ‘link’); tm.addVariable(‘viral.link’, ‘http://evtv.me’); tm.addVariable(‘viral.embed’, ‘http://evtv.me’); tm.addVariable(‘viral.allowmenu’, ‘true’); tm.addVariable(‘viral.allowdock’, ‘false’); tm.addVariable(‘hd.state’, ‘true’); tm.addVariable(‘hd.file’,’http://media2.ev-tv.me/news021111-1280.mov’); tm.addVariable(‘viral.onpause’, ‘false’); tm.addVariable(‘title’, ‘February 11, 2011’); tm.addVariable(‘description’, ‘EVTV Weekly News Show’); tm.addVariable(‘date’, ’02-11-11′); tm.addVariable(‘gapro.accountid’, ‘UA-9098110-1’); tm.addVariable(‘gapro.trackstarts’, ‘true’); tm.addVariable(‘gapro.trackpercentage’, ‘true’); tm.addVariable(‘gapro.tracktime’, ‘true’); tm.write(‘feb4’);
We contracted with Jim Husted for two controllers and two 9-inch motors at $14,000. We changed our minds and at George Hamstra’s anxious urging, given the visibility of this project, asked to change this to 11 inch motors. WE supplied both motors at our cost. Revised pricing: $14,000. ?????
Oh well, Jim’s an artiste, and kind of a starving one at that. We had kind of fumbled around on what transmission and of course changed horses, so to speak, mid stream. He HAD had a shaft made, but not much beyond that at the time. So whatever.
But the six weeks became six months, not a near miss. And last week we were assured it was going on the truck the next day, and of course please send a check. We noted we would send a check when Fedex had the item and we had a tracking number. Whoops, did we say TOMORROW. Oh, we don’t have any brushes for it. So much for Jim’s vaunted testing. He had never run the motor. Had no brushes for it, and apparently had no intention to ship it.
Finally this week they were shipping it. The freight? $1750 or thereabouts. Seems like a lot as we shipped motors and transmissions and so forth for $600 or so before. But the final result IS heavy and comes in a box five feet long. But he was REALLY REALLY going to ship it now and to prove it, he sent me the bill of lading and copy of the check to fedex – $1350 or thereabouts – forgetting that he had just invoiced me $1750 for freight.
Busted. Instead of an apology, I heard a litany of all he had to go through to build this motor, the weather being bad, losing his cat, problems with the wife, and all he’s striven to DO for this community over the years. Nothing, not even an apology, over the $400 disparity But he DID want me to know it would be ok if I also split the cost of the brushes – which somehow, someway, in his mind, never was included in the $14,000 estimate, for two motors he didn’t provide – WE did.
The ability of the human mind to rationalize all arguments in favor of their own pocketbooks is just without limit.
We also heard from Dennis at Crystalite. No the motor is not ready, and that 3-6 month estimate was perhaps optimistic. He assured me that companies do that in the United States MILLIONS of times per year. Oh, and rather than cover the cost of the controller, his boss had decided that they were spending enough on the motors, and whatever we discussed in the beginning, they had “decided” that I should pay for the controlller.
One of the things we discussed early on was the controller. At one point I actually cancelled the entire concept because they wanted to use a Kelley controller. Now we have used Kelly controllers and throttle pedals and a few other things in the past. I would not say successfully. The controller on the original speedster more or less worked, but it did have heat issues. And we had a couple of the throttles fail outright – again Kelley simply ignored their own warranty and explained they weren’t going to do that because they didn’t know how the throttle was used.
But we’ve also had a number of reports from viewers who had worse experiences with Kelley than ours. And while some of them were clearly operator error (turning on the maintenance switch with the ignition on is one way to blow any controllers input caps) there were enough of them we had decided to avoid their products generally.
So Cyrstalite was going to do their own controller or had another one in mind and wanted us to do this wheel motor thing. I was absolutely clear there would BE no Kelley in the car. They agreed. Six months later, all that has fallen through and they just HAVE to use the Kelly controller. Oh, and I have to pay for it.
We have put off a project I already had some $20,000 in, specifically to accommodate THEIR insistence that we should do it with wheel motors that were not only unproven, but had never ever been built or attempted by them. A six month delay, and THEN they want to change the game in all respects. And they’re “shocked” that I dont’ want to play anymore. I’m very happy to have not funded the motor part of this fiasco.
I have no idea what we’re to do or when with the Smart ForTwo. Mercedes Benz has since replaced Penske group, which sold all of 5200 Smarts in the U.S. last year. Mercedes Dealers are going to represent Smart and the hopes for the vehicle are actually pinned on their Smart Electric. This is actually a great move and a great car. The Smart is a fascinating vehicle with the absolute worst internal combustion engine and transmission I’ve ever seen and examined in person. By replacing it with electric drive, it becomes a great car almost by accident. It doesn’t belong on a freeway at all. But for city driving and parking it is actually a design example.
So six months later, the electric Smart ForTwo project almost doesn’t even make sense. The manufacturer is going to do what we were doing, and indeed is actually delivering cars before we got started. Thanks Crystalite.
EV’s have actually developed into a bit of a hot topic over the past two years. And everyone wants a piece of the action. That makes us, and you, a target. And not everyone is in it for the love of the game. All emerging industries attract a share of opportunists and fast buck artists. And the business ethic of even established firms has just eroded over time and economic pressure where it’s basically ok to do whatever you want to do in dealing with customers.
Its not ok. And ironically, I’ve never heard of one actually succeeding. The irony is that bottom feeders never do leave the bottom. With NO success stories to point to, it always mystifies me why the concept attracts so MANY players. But here’s the real deal. You cannot grow a business to success on the “there’s a sucker born every minute”
school of business.
This is not so Jesus will love you. Veteran entreprenuers viscerally know that the realistic margins that can be achieved on the value add of any product, never quite covers the cost of new business. What this means is that to succeed and grow, ALL businesses, and there just arent’ any exceptions, have to have a flow of cash from residual returning customers. In fact, this is so ingrained that a signficant and indeed usually central element of valuing any business is a concept called “good will”. This is an accounting attempt to value the “momentum” of a business based on a loyal customer base who return time after time for new purchases without the high costs of advertising, marketing, etc. They already have your number. And they need another one. Their friend needs one too. After awhile, they really need to keep a couple on the shelves.
This is true of ALL businesses and often MORE true of those you wouldnt’ think so. Running a hotdog stand is just selling hotdogs to random passersby. Anyone who has ever run one though can tell you that it doesn’t work at all unless you are at the SAME place at the SAME time for your regular customers whom you quickly get to know and have something to say to or ask about EVERY time they show. The new business is almost a distraction. You need it, but it isn’t where your bread comes from.
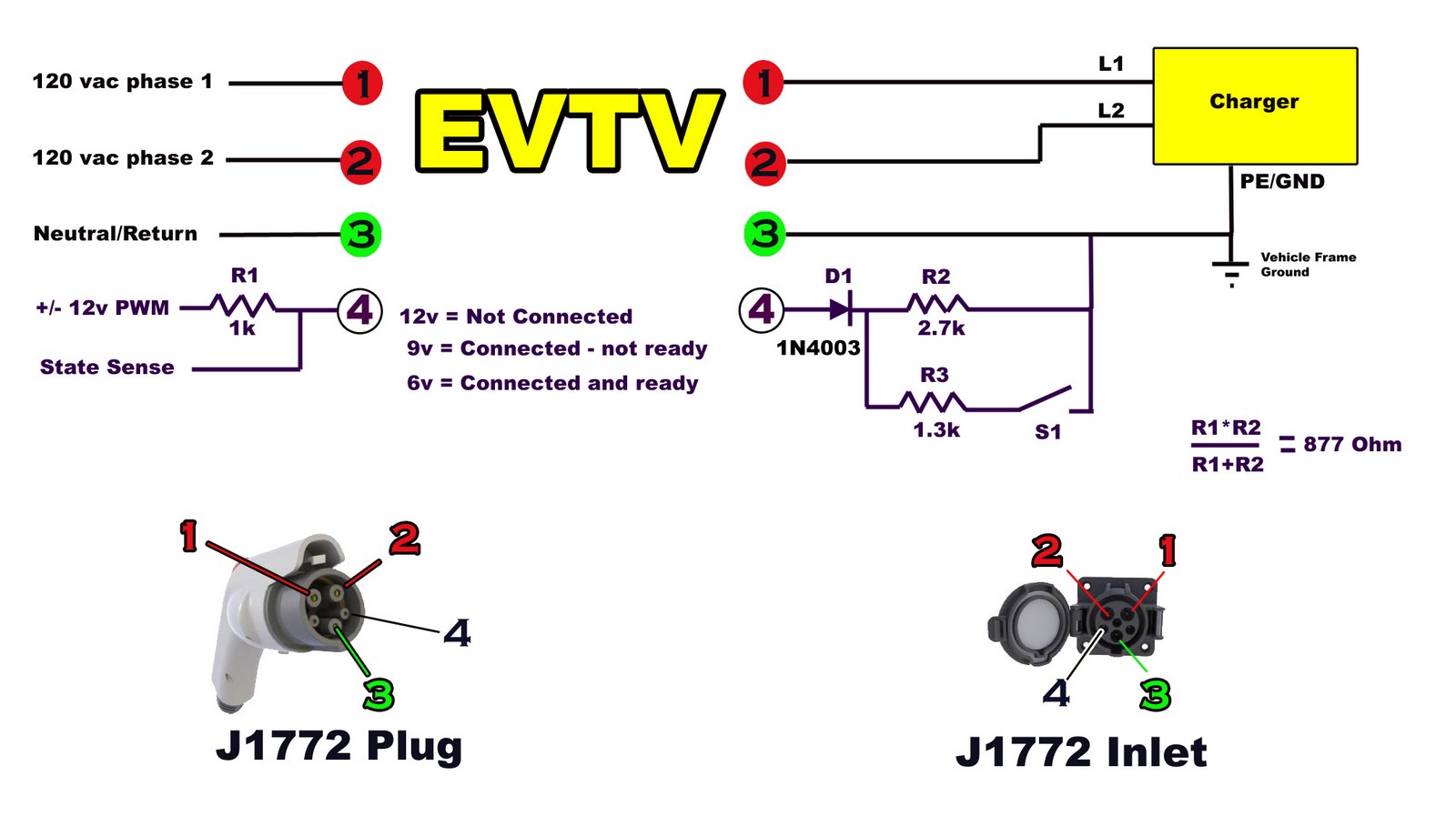
EVTV is a good, though counterintuitive example. You would naturally assume that our mission is to get more viewers. Actually not. Our mission is to make about 6 billion viewers go away. Leaving us with a handful that are intensely interested in electric cars. Not people who think electric cars are cool. People who think about electric cars all the time. That’s a market. Every time someone watches one of our videos I’m out a quarter. If they watch once and go away, I’m not out that much. If they stay, they must like two hour videos about ultracpacitors and DC-DC converters and how to implement J1772 for $300 dollars instead of $5000. Since most of the six billion don’t know J1772 from Jay Leno, they have to be “fired” as customers.
As to advertisers, we are having a hard time getting industry players onboard, and actually attracting bizarre requests for general ads. We can’t advertise weight loss on EVTV no matter how heavy you guys really are. Why? We can’t do them sufficient value add to make them “stick” as an advertiser. We would have to have a constant flow of new ones. There’s no business there. We have to find products and companies that will actually benefit getting the message to THIS group of viewers. Otherwise, we are selling too hard all the time and the cost of hte new business will ALWAYS swamp the value we can add…
Unless.. .. we MIGHT be able to pad the freight a little…..
Oh, the show. An introduction to capacitors and we build an Ultracap aux battery to smooth the 12v system. We got the motor temperature switch hooked up to the Soliton1.
OH and the best part, not really stressed in the video because we hadn’t really tested it at the time…. We now have a FULL SWEEP fuel gage, this is a beautiful little lit fuel gage whose needle goes from about 5 clock position to about 7 clock position the long way around, tied to the Zeva2 AH counter. We can easily compare this with our EVision AH counter. It appears to be QUITE accurate, quite visual, and very familiar to those who have driven a car before. It is a little counterintuitive and non obvious as to how to set this up, but if you pursue it persistently, it works MARVELOUSLY. I know it seems ordinary. BUt it is a breakthrough to me.
Finally, we give you a peak at our new showroom. We now have three porsches, two gems, a Green minivan, and a 2009 Mini Cooper in electric drive. And we’re starting our Cadillac Escalade project. Both for reasons of cost, and as importantly for reasons of space, we just can’t keep acquiring electric cars indefinitely So we’re going to open a show room, kind of phyiscally modelled after Special Editions’s new show room we saw in Bremen Indiana. And we’re going to backdoor out our completed works to make room and funding for new ones. So I guess, in an odd way, we ARE in the electric car business. Since you all are builders, you probably wont’ find it of much interest regarding a car purchase, but you might like to stop by and try our NINCO FOUR LANE slot car track. We have two Speedsters, a Spyder, and two minis on it at the moment.
Jack Rickard









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}